物聯(lián)網(wǎng)有哪些定位技術(shù)!定位正在從室外走向室內(nèi)
定位技術(shù)我們并不陌生,從航海、航天、航空、測繪、軍事、自然災害預防等“高大上”領(lǐng)域,到日常生活中的人員搜尋、位置查找、交通管理、車輛導航與路線規(guī)劃等等,各種定位技術(shù)都有廣泛應用,也讓我們越來越無處遁形。總體來說,定位可以按照使用場景的不同劃分為室內(nèi)定位和室外定位兩大類,場景不同,需求也就不同,采用的定位技術(shù)也不盡相同。
①成熟的室外定位技術(shù)
衛(wèi)星定位和基站定位
目前應用于室外定位的主流技術(shù)主要有衛(wèi)星定位和基站定位兩種。
1.衛(wèi)星定位
衛(wèi)星定位即是通過接收衛(wèi)星提供的經(jīng)緯度坐標信號來進行定位,衛(wèi)星定位系統(tǒng)主要有:美國全球定位系(GPS)、俄羅斯格洛納斯(GLONASS)、歐洲伽利略(GALILEO)系統(tǒng)、中國北斗衛(wèi)星導航系統(tǒng),其中GPS系統(tǒng)是現(xiàn)階段應用*為廣泛、技術(shù)*為成熟的衛(wèi)星定位技術(shù)。GPS全球衛(wèi)星定位系統(tǒng)由三部分組成:空間部分、地面控制部分、用戶設備部分。
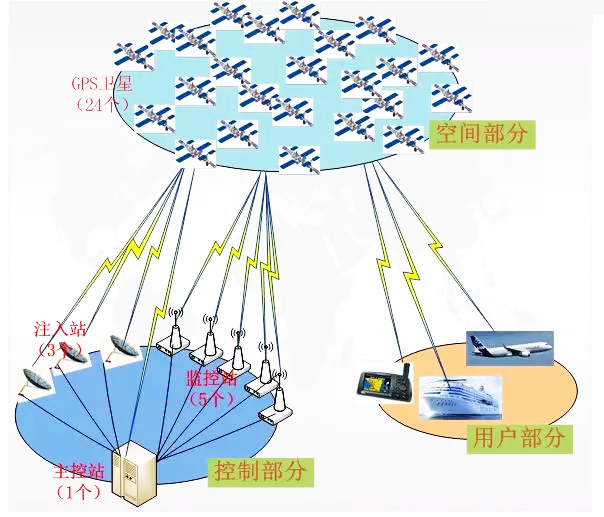
● 空間部分是由24 顆工作衛(wèi)星組成,它們均勻分布在6 個軌道面上(每個軌道面4 顆),衛(wèi)星的分布使得在全球**地方、**時間都可觀測到4 顆以上的衛(wèi)星,并能保持良好定位解算精度的幾何圖象;
● 控制部分主要由監(jiān)測站、主控站、備用主控站、信息注入站構(gòu)成,主要負責GPS衛(wèi)星陣的管理控制;
● 用戶設備部分主要是GPS接收機,主要功能是接收GPS衛(wèi)星發(fā)射的信號,獲得定位信息和觀測量,經(jīng)數(shù)據(jù)處理實現(xiàn)定位。
GPS的定位原理說白了就是通過四顆已知位置的衛(wèi)星來確定GPS接收器的位置。要達到這一目的,衛(wèi)星的位置可以根據(jù)星載時鐘所記錄的時間在衛(wèi)星星歷中查出。而用戶到衛(wèi)星的距離則通過紀錄衛(wèi)星信號傳播到用戶所經(jīng)歷的時間,再將其乘以光速得到(由于大氣層電離層的干擾,這一距離并不是用戶與衛(wèi)星之間的真實距離,而是偽距)。當GPS衛(wèi)星正常工作時,會不斷地用1和0二進制碼元組成的偽隨機碼(簡稱偽碼)發(fā)射導航電文。導航電文包括衛(wèi)星星歷、工作狀況、時鐘改正、電離層時延修正、大氣折射修正等信息。然而,由于用戶接受機使用的時鐘與衛(wèi)星星載時鐘不可能總是同步,所以除了用戶的三維坐標x、y、z外,還要引進一個變量 t 即衛(wèi)星與接收機之間的時間差作為未知數(shù),然后用4個方程將這4個未知數(shù)解出來。所以如果想知道接收機所處的位置,*少要能接收到4個衛(wèi)星的信號。如下圖所示:
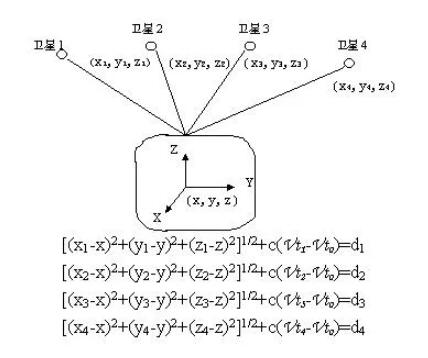
圖:GPS定位原理
衛(wèi)星定位雖然精度高、覆蓋廣,但其成本昂貴、功耗大,并不適合于所有用戶。
2.基站定位
基站定位一般應用于手機用戶,手機基站定位服務又叫做移動位置服務(LBS,Location Based Service),它是通過電信移動運營商的網(wǎng)絡(如GSM網(wǎng))獲取移動終端用戶的位置信息。

手機等移動設備在插入sim卡開機以后,會主動搜索周圍的基站信息,與基站建立聯(lián)系,而且在可以搜索到信號的區(qū)域,手機能搜索到的基站不止一個,只不過遠近程度不同,再進行通信時會選取距離*近、信號*強的基站作為通信基站。其余的基站并不是沒有用處了,當你的位置發(fā)生移動時,不同基站的信號強度會發(fā)生變化,如果基站A的信號不如基站B了,手機為了防止突然間中斷鏈接,會先和基站B進行通信,協(xié)調(diào)好通信方式之后就會從A切換到B。這也就是為什么同樣是待機**,你在火車上比在家里耗電要多的原因,手機需要不停的搜索、連接基站。 基站定位的原理也很簡單:我們知道,距離基站越遠,信號越差,根據(jù)手機收到的信號強度可以大致估計距離基站的遠近,當手機同時搜索到*少三個基站的信號時(現(xiàn)在的網(wǎng)絡覆蓋這是很輕松的一件事情),大致可以估計出距離基站的遠近;基站在移動網(wǎng)絡中是**確定的,其地理位置也是**的,也就可以得到三個基站(三個點)距離手機的距離,根據(jù)三點定位原理,只需要以基站為圓心,距離為半徑多次畫圓即可,這些圓的交點就是手機的位置。
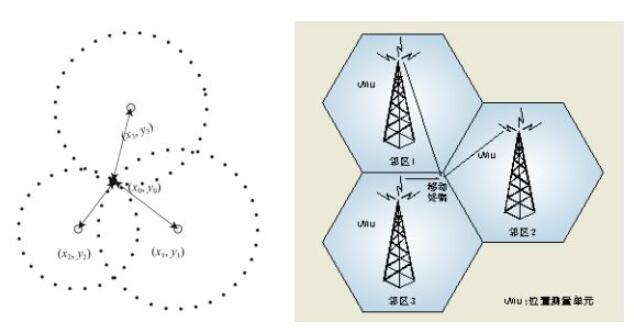
圖:基站“三點定位”原理
由于基站定位時,信號很容易受到干擾,所以先天就決定了它定位的不準確性,精度大約在150米左右,基本無法開車導航。定位條件是必須在有基站信號的位置,手機處于sim卡注冊狀態(tài)(飛行模式下開wifi和拔出sim卡都不行),而且必須收到3個基站的信號,無論是否在室內(nèi)。但是,定位速度超快,一旦有信號就可以定位,目前主要用途是沒有GPS且沒有wifi的情況下快速大體了解下你的位置。
②定位技術(shù)從室外走向室內(nèi)
需求很旺盛,挑戰(zhàn)也很多
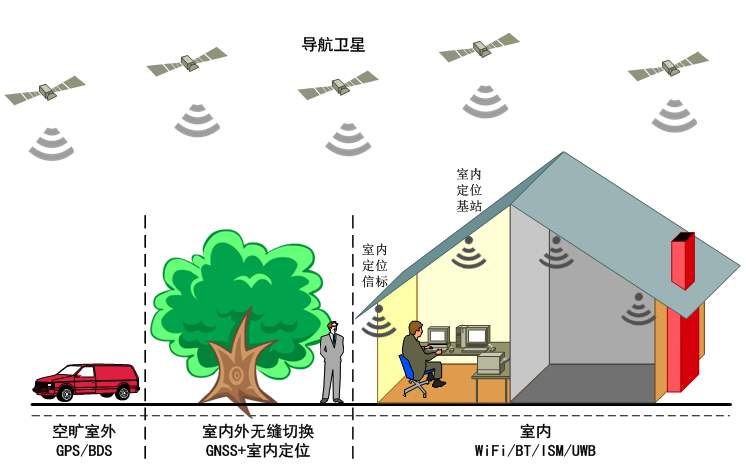
GPS和基站定位技術(shù)基本滿足了用戶在室外場景中對位置服務的需求。然而,人的一生當中有80%的時間是在室內(nèi)度過的,個人用戶、服務機器人、新型物聯(lián)網(wǎng)設備等大量的定位需求也發(fā)生在室內(nèi);而室內(nèi)場景受到建筑物的遮擋,GNSS信號快速衰減,甚***拒止,無法滿足室內(nèi)場景中導航定位的需要。近年來,位置服務的相關(guān)技術(shù)和產(chǎn)業(yè)正從室外向室內(nèi)發(fā)展,以提供無所不在的基于位置的服務,其主要推動力是室內(nèi)位置服務所能帶來的**的應用和商業(yè)潛能。許多公司包括OS提供商、服務提供商,設備和芯片提供商都在競爭這個市場。
1.室內(nèi)定位應用
室內(nèi)定位即通過技術(shù)手段獲知人們在室內(nèi)所處的實時位置或者行動軌跡。基于這些信息能夠?qū)崿F(xiàn)多種應用。
● 大型商場中的商戶能夠通過室內(nèi)定位技術(shù)獲知哪些地方人流量**,客人們通常會選擇哪些行動路線等,從而更科學地布置柜臺或者選擇舉辦促銷活動的地點。
● 客人也可以利用室內(nèi)定位技術(shù)更方便地找到所需購買物品的擺放區(qū)域,并獲得前往該處的**路線。
● 家長不用再擔心孩子在商場中走失,通過室內(nèi)定位技術(shù)可以實時定位孩子的位置。
● 公司的管理者則可以運用室內(nèi)定位技術(shù)實時獲知室內(nèi)的人員狀況,從而更好地優(yōu)化空調(diào)的使用等,達到節(jié)能減排的目的,還能夠有效提高**保衛(wèi)的水平。
● 通過部署室內(nèi)定位技術(shù),電信運營商能夠更好地找到室內(nèi)覆蓋的“盲點”和“熱點”區(qū)域,更好地在室內(nèi)為用戶提供通信服務。
2.室內(nèi)定位面臨的挑戰(zhàn)
和室外定位相比,室內(nèi)定位面臨很多獨特的挑戰(zhàn), 比如說室內(nèi)的環(huán)境動態(tài)性很強,可以說是多種多樣,不同的大廈會有不同的室內(nèi)布局;室內(nèi)的環(huán)境更加精細,由此也需要更高的精度來分辨不同的特征。
那么實用的室內(nèi)定位解決方案都需要滿足那些要求呢?主要包括以下幾個方面:精度、覆蓋范圍、可靠性、成本、功耗、可擴展性和響應時間。
精度:對精度的要求不同的應用差別很大,比如在超市或倉庫找一個特定的商品可能需要1米甚*更低的精度,如果在購物**尋找一個特定的品牌或餐館,5-10米的精度就能滿足要求。
覆蓋范圍:覆蓋范圍主要是指一個技術(shù)和解決方案可以在多大的范圍內(nèi)提供滿足精度的覆蓋。有些技術(shù)需要相應或?qū)S玫幕A設施支撐并結(jié)合相應的定位終端使用,這樣它的覆蓋就只是布局了相應技術(shù)的環(huán)境范圍。
可靠性:前面提到室內(nèi)環(huán)境動態(tài)性很強,會經(jīng)常發(fā)生改變,比如商場的設置和隔斷會經(jīng)常發(fā)生變化。另一方面,定位所依賴的基礎設施也會經(jīng)常發(fā)生變化。舉個例子,一些大型的會議,參展商會架設自己的WiFi 熱點, 這些設施會動態(tài)變化位置,甚*有時開有時關(guān),如果定位技術(shù)是基于WiFi的,可靠的系統(tǒng)應該不會受到這些因素的影響。
成本和復雜度:成本和復雜度指標涵蓋兩個方面。一個是定位終端的成本,是不是可以用終端已有的硬件而不添加新的硬件。另一方面是布局和維護的成本及其復雜度,包括布局與維護定位所需要的設施和采集相關(guān)的數(shù)據(jù)庫。
功耗:定位所產(chǎn)生的功耗是一個很重要的指標尤其對使用電池的移動設備,如果功耗大很快使設備沒電了,就限制了用戶的使用。有調(diào)查表明,電池消耗過快是很多用戶不開啟定位功能的一個主要因素。所以,如果要實現(xiàn)隨時隨地的位置感知,必須**定位所增加的設備額外功耗。
可擴展性:可擴展性指一個解覺方案擴展到更大的覆蓋范圍使用的能力,和方便地移植到不同的環(huán)境和應用的能力。
響應時間:系統(tǒng)給出一個位置更新所需的時間是響應時間,不同的應用需求不同,比如移動用戶和導航應用需要快的位置更新。
③蓬勃發(fā)展的室外定位技術(shù)
WiFi、藍牙、RFID、紅外等等各有特殊
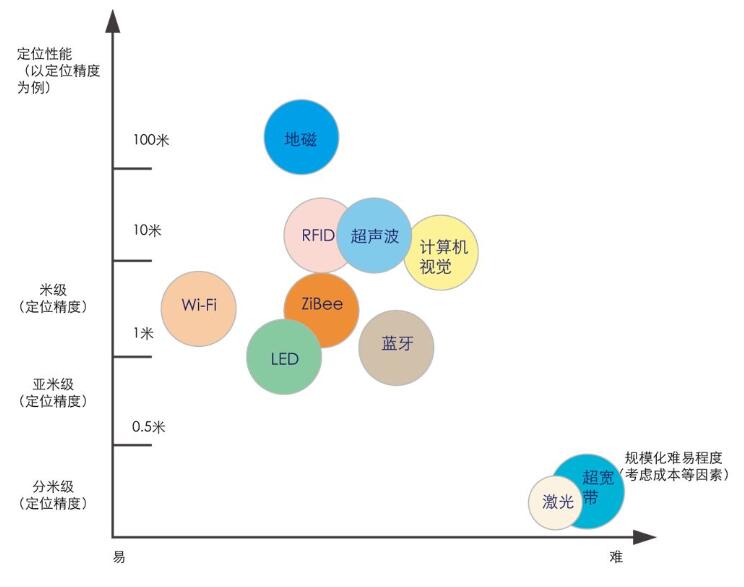
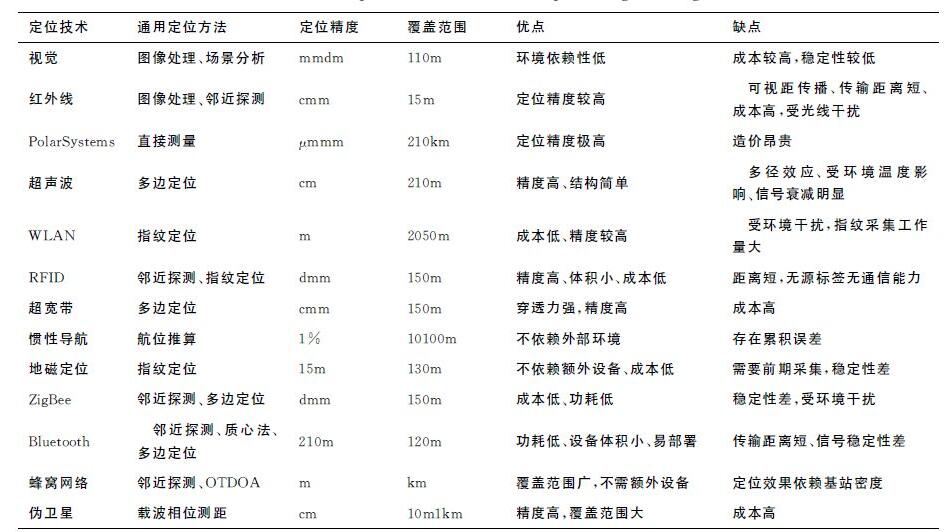
室內(nèi)定位的技術(shù)分支多樣,下圖是各種室內(nèi)定位方案的對比圖:
目前室內(nèi)定位常用的定位方法,從原理上主要分為七種:鄰近探測法、質(zhì)心定位法、多邊定位法、三角定位法、極點法、指紋定位法和航位推算法。
根據(jù)上面介紹的定位原理和觀測量,衍生出了多種室內(nèi)定位技術(shù),下面將對主流的室內(nèi)定位技術(shù)進行簡要介紹。
1.WiFi定位技術(shù)
目前WiFi是相對成熟且應用較多的技術(shù),這幾年有不少公司投入到了這個領(lǐng)域。WiFi室內(nèi)定位技術(shù)主要有兩種。
WiFi定位一般采用“近鄰法”判斷,即*靠近哪個熱點或基站,即認為處在什么位置,如附近有多個信源,則可以通過交叉定位(三角定位),提高定位精度。
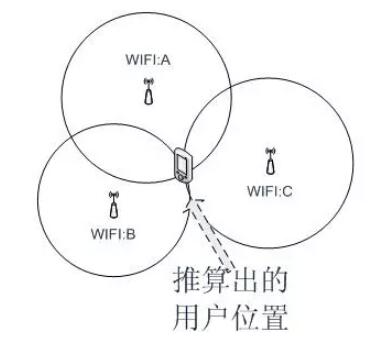
由于WiFi已普及,因此不需要再鋪設專門的設備用于定位。用戶在使用智能手機時開啟過Wi-Fi、移動蜂窩網(wǎng)絡,就可能成為數(shù)據(jù)源。該技術(shù)具有便于擴展、可自動更新數(shù)據(jù)、成本低的優(yōu)勢,因此**實現(xiàn)了規(guī)模化。不過,WiFi熱點受到周圍環(huán)境的影響會比較大,精度較低。為了做得準一點有公司就做了WiFi指紋采集,事先記錄巨量的確定位置點的信號強度,通過用新加入的設備的信號強度對比擁有巨量數(shù)據(jù)的數(shù)據(jù)庫,來確定位置。
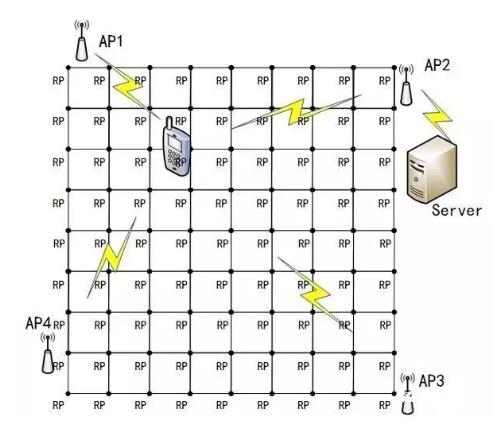
由于采集工作需要大量的人員來進行,并且要定期進行維護,技術(shù)難以擴展,很少有公司能把國內(nèi)的這么多商場定期的更新指紋數(shù)據(jù)。
WiFi定位可以實現(xiàn)復雜的大范圍定位,但精度只能達到2米左右,無法做到精準定位。因此適用于對人或者車的定位導航,可以于醫(yī)療機構(gòu)、主題公園、工廠、商場等各種需要定位導航的場合。
2.FRID定位技術(shù)
RFID定位的基本原理是,通過一組固定的閱讀器讀取目標RFID標簽的特征信息(如身份ID、接收信號強度等),同樣可以采用近鄰法、多邊定位法、接收信號強度等方法確定標簽所在位置。
這種技術(shù)作用距離短,一般*長為幾十米。但它可以在幾毫秒內(nèi)得到厘米級定位精度的信息,且傳輸范圍很大,成本較低。同時由于其非接觸和非視距等優(yōu)點,可望成為優(yōu)選的室內(nèi)定位技術(shù)。
目前,射頻識別研究的熱點和難點在于理論傳播模型的建立、用戶的**隱私和**標準化等問題。優(yōu)點是標識的體積比較小,造價比較低,但是作用距離近,不具有通信能力,而且不便于整合到其他系統(tǒng)之中,無法做到精準定位,布設讀卡器和天線需要有大量的工程實踐經(jīng)驗難度大。
3.紅外定位技術(shù)
紅外線是一種波長在無線電波和可見光波之間的電磁波。紅外定位主要有兩種具體實現(xiàn)方法,一種是將定位對象附上一個會發(fā)射紅外線的電子標簽,通過室內(nèi)安放的多個紅外傳感器測量信號源的距離或角度,從而計算出對象所在的位置。這種方法在空曠的室內(nèi)容易實現(xiàn)較高精度,可實現(xiàn)對紅外輻射源的被動定位,但紅外很容易被障礙物遮擋,傳輸距離也不長,因此需要大量密集部署傳感器,造成較高的硬件和施工成本。此外紅外易受熱源、燈光等干擾,造成定位精度和準確度下降。
該技術(shù)目前主要用于軍事上對飛行器、坦克、導彈等紅外輻射源的被動定位,此外也用于室內(nèi)自走機器人的位置定位。
另一種紅外定位的方法是紅外織網(wǎng),即通過多對發(fā)射器和接收器織成的紅外線網(wǎng)覆蓋待測空間,直接對運動目標進行定位。
這種方式的優(yōu)勢在于不需要定位對象攜帶**終端或標簽,隱蔽性強,常用于安防領(lǐng)域。劣勢在于要實現(xiàn)精度較高的定位需要部署大量紅外接收和發(fā)射器,成本**高,因此只有高等級的安防才會采用此技術(shù)。
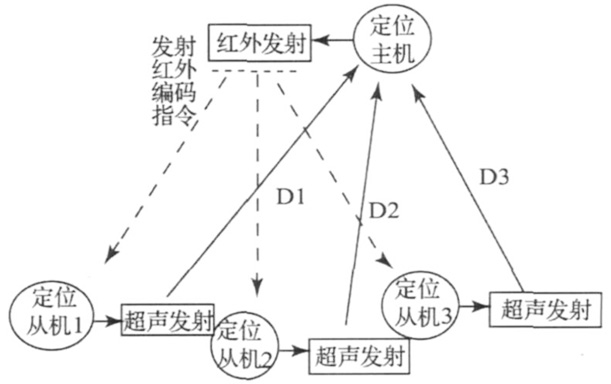
4.超聲波定位技術(shù)
超聲波定位目前大多數(shù)采用反射式測距法。系統(tǒng)由一個主測距器和若干個電子標簽組成,主測距器可放置于移動機器人本體上,各個電子標簽放置于室內(nèi)空間的固定位置。
定位過程如下:先由上位機發(fā)送同頻率的信號給各個電子標簽,電子標簽接收到后又反射傳輸給主測距器,從而可以確定各個電子標簽到主測距器之間的距離,并得到定位坐標。

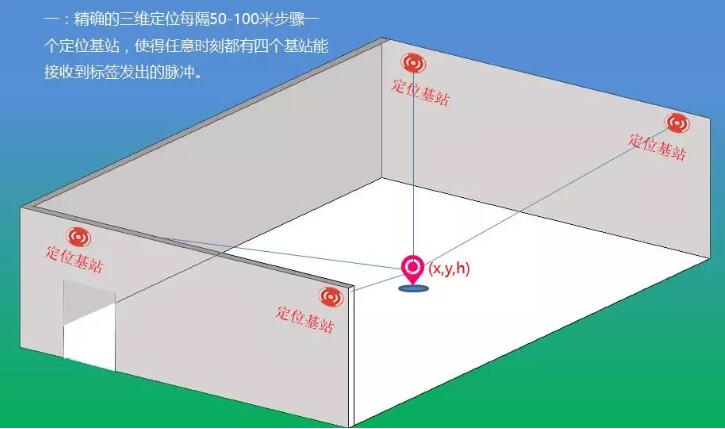
目前,比較流行的基于超聲波室內(nèi)定位的技術(shù)還有兩種:一種為將超聲波與射頻技術(shù)結(jié)合進行定位。由于射頻信號傳輸速率接近光速,遠高于射頻速率,那么可以利用射頻信號先**電子標簽而后使其接收超聲波信號,利用時間差的方法測距。這種技術(shù)成本低,功耗小,精度高。另一種為多超聲波定位技術(shù)。該技術(shù)采用全局定位,可在移動機器人身上4個朝向安裝4個超聲波傳感器,將待定位空間分區(qū),由超聲波傳感器測距形成坐標,總體把握數(shù)據(jù),抗干擾性強,精度高,而且可以解決機器人迷路問題。
超聲波定位精度可達厘米級,精度比較高。缺陷是超聲波在傳輸過程中衰減**從而影響其定位有效范圍。
5.藍牙定位技術(shù)
藍牙定位基于RSSI(Received Signal Strength Indication,信號場強指示)定位原理。根據(jù)定位端的不同,藍牙定位方式分為網(wǎng)絡側(cè)定位和終端側(cè)定位。
網(wǎng)絡側(cè)定位系統(tǒng)由終端(手機等帶低功耗藍牙的終端)、藍牙beacon節(jié)點,藍牙網(wǎng)關(guān),無線局域網(wǎng)及后端數(shù)據(jù)服務器構(gòu)成。其具體定位過程是:
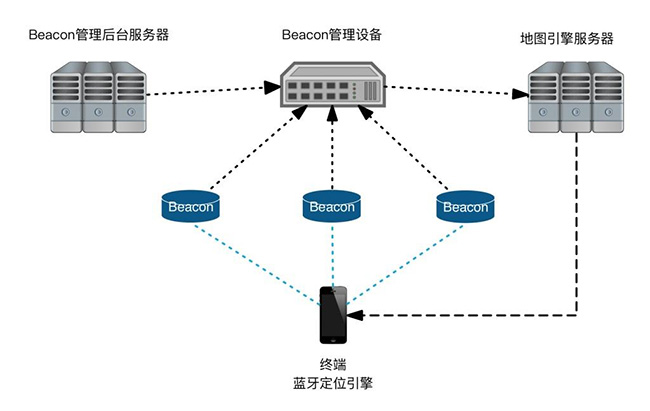
1)首先在區(qū)域內(nèi)鋪設beacon和藍牙網(wǎng)關(guān)。
2)當終端進入beacon信號覆蓋范圍,終端就能感應到beacon的廣播信號,然后測算出在某beacon下的RSSI值通過藍牙網(wǎng)關(guān)經(jīng)過wifi網(wǎng)絡傳送到后端數(shù)據(jù)服務器,通過服務器內(nèi)置的定位算法測算出終端的具體位置。
終端側(cè)定位系統(tǒng)由終端設備(如嵌入SDK軟件包的手機)和beacon組成。其具體定位原理是:
1)首先在區(qū)域內(nèi)鋪設藍牙信標
2)beacon不斷的向周圍廣播信號和數(shù)據(jù)包
3)當終端設備進入beacon信號覆蓋的范圍,測出其在不同基站下的RSSI值,然后再通過手機內(nèi)置的定位算法測算出具體位置。
終端側(cè)定位一般用于室內(nèi)定位導航,精準位置營銷等用戶終端;而網(wǎng)絡側(cè)定位主要用于人員跟蹤定位,資產(chǎn)定位及客流分析等情境之中。藍牙定位的優(yōu)勢在于實現(xiàn)簡單,定位精度和藍牙信標的鋪設密度及發(fā)射功率有密切關(guān)系。并且**省電,可通過深度睡眠、免連接、協(xié)議簡單等方式達到省電目的。
6.慣性導航技術(shù)
這是一種純客戶端的技術(shù),主要利用終端慣性傳感器采集的運動數(shù)據(jù),如加速度傳感器、陀螺儀等測量物體的速度、方向、加速度等信息,基于航位推測法,經(jīng)過各種運算得到物體的位置信息。
隨著行走時間增加,慣性導航定位的誤差也在不斷累積。需要外界更高精度的數(shù)據(jù)源對其進行校準。所以現(xiàn)在慣性導航一般和WiFi指紋結(jié)合在一起, 每過一段時間通過WiFi請求室內(nèi)位置,以此來對MEMS產(chǎn)生的誤差進行修正。該技術(shù)目前的商用得也比較成熟,在掃地機器人中得到廣泛應用。
7.超寬帶(UWB)定位技術(shù)
超寬帶技術(shù)是近年來新興一項全新的、與傳統(tǒng)通信技術(shù)有極大差異的通信無線新技術(shù)。它不需要使用傳統(tǒng)通信體制中的載波,而是通過發(fā)送和接收具有納秒或微秒級以下的極窄脈沖來傳輸數(shù)據(jù),從而具有3.1~10.6GHz量級的帶寬。目前,包括美國,日本,加拿大等在內(nèi)的**都在研究這項技術(shù),在無線室內(nèi)定位領(lǐng)域具有良好的前景。
UWB技術(shù)是一種傳輸速率高,發(fā)射功率較低,穿透能力較強并且是基于極窄脈沖的無線技術(shù),無載波。正是這些優(yōu)點,使它在室內(nèi)定位領(lǐng)域得到了較為**的結(jié)果。
超寬帶(UWB)定位技術(shù)利用事先布置好的已知位置的錨節(jié)點和橋節(jié)點,與新加入的盲節(jié)點進行通訊,并利用三角定位或者“指紋”定位方式來確定位置。
超寬帶可用于室內(nèi)**定位,例如戰(zhàn)場士兵的位置發(fā)現(xiàn)、機器人運動跟蹤等。超寬帶系統(tǒng)與傳統(tǒng)的窄帶系統(tǒng)相比,具有穿透力強、功耗低、抗干擾**好、**性高、系統(tǒng)復雜度低、能提供**定位精度等優(yōu)點。因此,超寬帶技術(shù)可以應用于室內(nèi)靜止或者移動物體以及人的定位跟蹤與導航,且能提供****的定位精度。根據(jù)不同公司使用的技術(shù)手段或算法不同,精度可保持在0.1 m~0.5 m。
8.LED可見光定位技術(shù)
可見光是一個新興領(lǐng)域,通過對每個LED燈進行編碼,將ID調(diào)制在燈光上,燈會不斷發(fā)射自己的ID,通過利用手機的前置攝像頭來識別這些編碼。利用所獲取的識別信息在地圖數(shù)據(jù)庫中確定對應的位置信息,完成定位。
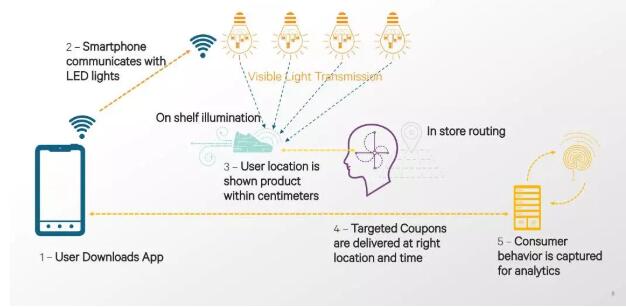
根據(jù)燈光到達的角度進一步細化定位的結(jié)果,高通公司做到了厘米級定位精度。由于不需要額外部署基礎設施,終端數(shù)量的擴大對性能沒有**的影響,并且可以達到一個**高的精度,該技術(shù)被高通公司所看好。
目前,可見光技術(shù)在北美有很多商場已經(jīng)在部署。用戶下載應用后,到達商場里的某一個貨架,通過**貨架周圍的燈光即可知曉具體位置,商家在通過這樣的方法向消費者推動商品的折扣等信息。
9.地磁定位技術(shù)
地球可視為一個磁偶極,其中一極位在地理北極附近,另一極位在地理南極附近。地磁場包括基本磁場和變化磁場兩個部分。基本磁場是地磁場的主要部分,起源于地球內(nèi)部,比較穩(wěn)定,屬于靜磁場部分。變化磁場包括地磁場的各種短期變化,主要起源于地球內(nèi)部,相對比較微弱。
現(xiàn)代建筑的鋼筋混凝土結(jié)構(gòu)會在局部范圍內(nèi)對地磁產(chǎn)生擾亂,指南針可能也會因此受到影響。原則上來說,非均勻的磁場環(huán)境會因其路徑不同產(chǎn)生不同的磁場觀測結(jié)果。而這種被稱為 IndoorAtlas的定位技術(shù),正是利用地磁在室內(nèi)的這種變化進行室內(nèi)導航,并且導航精度已經(jīng)可以達到 0.1 米到 2 米。
不過使用這種技術(shù)進行導航的過程還是稍顯麻煩。你需要先將室內(nèi)樓層平面圖上傳到 IndoorAtlas 提供的地圖云中,然后你需要使用其移動客戶端實地記錄目標地點不同方位的地磁場。記錄的地磁數(shù)據(jù)都會被客戶端上傳*云端,這樣其它人才能利用已記錄過的地磁進行**室內(nèi)導航。
百度于2014年戰(zhàn)略投資了地磁定位技術(shù)開發(fā)商IndoorAtlas,并于2015年6月宣布在自己的地圖應用中使用其地磁定位技術(shù),將該技術(shù)與Wi-Fi熱點地圖、慣性導航技術(shù)聯(lián)合使用。精度高, 宣傳商業(yè)應用中,可以達到米級定位標準,但磁信號容易受到環(huán)境中不斷變化的電、磁信號源干擾,定位結(jié)果不穩(wěn)定,精度會受影響。
10.視覺定位
視覺定位系統(tǒng)可以分為兩類,一類是通過移動的傳感器(如攝像頭)采集圖像確定該傳感器的位置,另一類是固定位置的傳感器確定圖像中待測目標的位置。根據(jù)參考點選擇不同又可以分為參考三維建筑模型、圖像、預部署目標、投影目標、參考其他傳感器和無參考。
參考3D建筑模型和圖像分別是以已有建筑結(jié)構(gòu)數(shù)據(jù)庫和預先標定圖像進行比對。而為了提高魯棒性,參考預部署目標使用布置好的特定圖像標志(如二維碼)作為參考點;投影目標則是在參考預部署目標的基礎上在室內(nèi)環(huán)境投影參考點。參考其他傳感器則可以融合其他傳感器數(shù)據(jù)以提高精度、覆蓋范圍或魯棒性。
除了以上提及的,目前來看定位技術(shù)的種類有幾十甚*上百種,而每種定位技術(shù)都有自己的優(yōu)缺點和適合的應用場景,沒有**的勝負之分。根據(jù)不用的需求因地制宜的部署解決方案,方為上策~
文章來源微信公眾號物聯(lián)網(wǎng)智庫